Driving range is the most important parameter of EVs (electric vehicles). EV drivers are terrified at the thought of their battery gauge emptying out before arriving to their destination. EV makers are constantly increasing the range, but a larger battery increases the vehicle’s cost and weight.
But there is a more intelligent way to increase the range – Eco-driving using V2X. It can optimize the two critical parameters impacting range: acceleration and wind resistance.
In urban driving, drivers needlessly accelerate when the traffic light turns green, just to stop at the next red traffic light. Acceleration is a major power consumer.[1] V2X devices at traffic lights provide Green Light Optimal Speed Advisory (GLOSA). A research showed a maximum of 47% energy savings.[2]
V2X massive infrastructure deployments, currently taking place in Austria, are expanding to more European states. This V2X infrastructure deployment will assure energy savings for EVs regardless of the penetration of V2X vehicles. China is also committed to mass V2X infrastructure deployment, meaning that local EV drivers will also reap the energy saving benefits.
On the highway, where range matters the most, V2X saving potential is even higher. High-speed EV accelerations are extremely inefficient because of the higher the electrical engine speed, the lower torque and higher power consumption.[3] EVs range shortens significantly on highways [4] due to two reasons: motor spinning at a faster and less-efficient speed and the aerodynamic drag increasing proportionally to the square of speed.
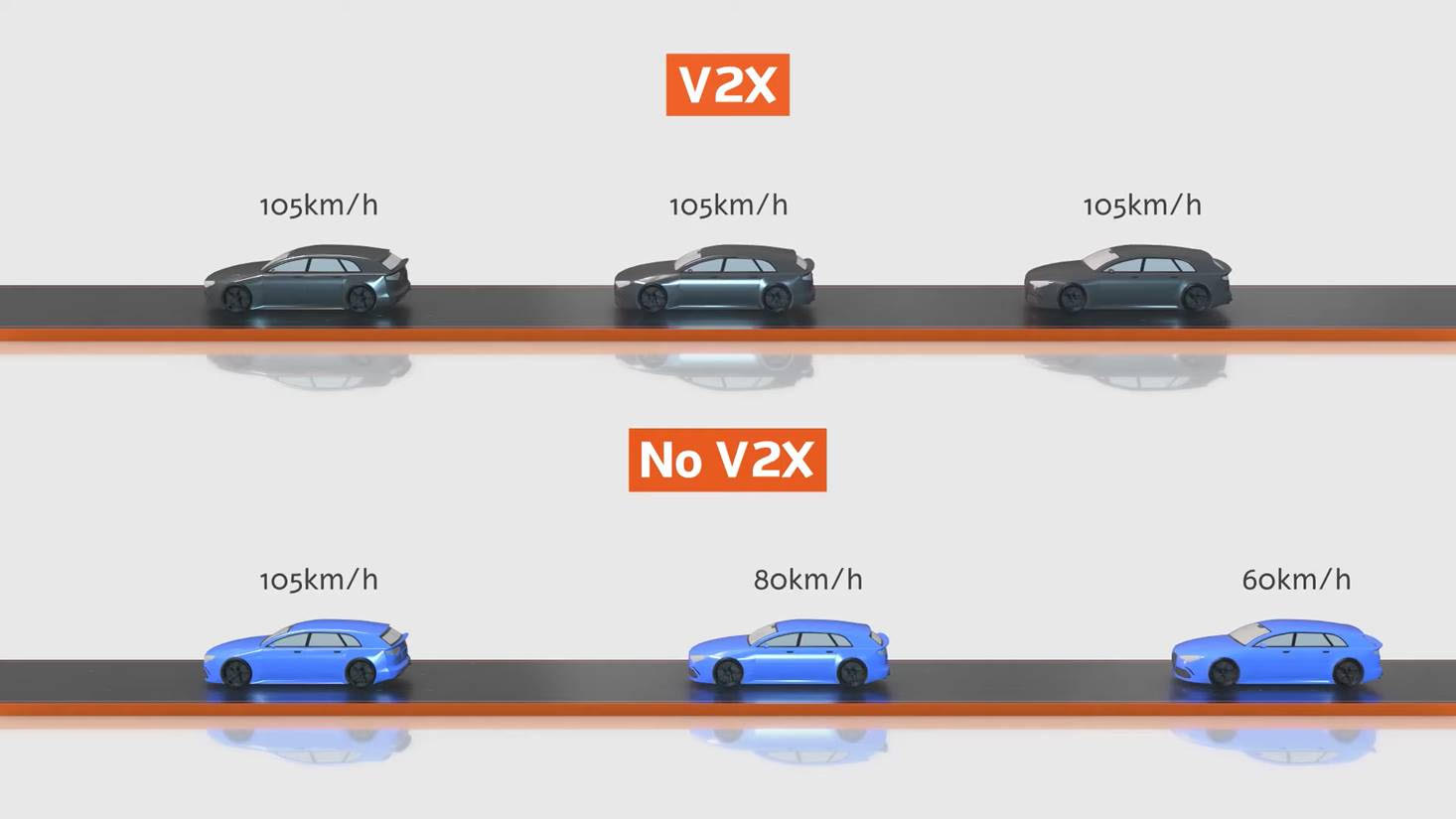
Knowing the speed of vehicles 300m ahead, as is possible with Cooperative Adaptive Cruise Control (CACC), smoothens the highway speed changes. That compares to a non-connected Adaptive Cruise Control (ACC)[5] system responding to those changes in many seconds delay, causing unnecessary wasteful acceleration and braking.
CACC has no positive impact when the road is not congested, but then drivers do not brake and accelerate. As road congestion grows, driving becomes less efficient, and that is when CACC energy saving increases. The amount of saving depends on the V2X penetration.[6] Since a speed drop ahead can be detected using a small subset of the vehicles ahead, the energy saving is evident even with minor V2X penetration.
Another CACC saving results from gap reduction between vehicles, enabling them to form a platoon. Aerodynamic drag becomes the largest cause of energy loss from speeds upward of around 70 km/h, irrespective of the type of car.[7] Shortening the gap from 2.5 seconds to 1 second nearly doubles the air drag reduction. Platooning requires higher V2X penetration, thus the saving would be unveiled in the future.
With V2X, drivers and advanced driving support systems are aware of upcoming road events well in advance. With that knowledge, the most energy-efficient driving decisions are taken. EV range is increased in everyday driving, bringing the actual range closer to the ideal one.
[1] Analysis of Parameters Influencing Electric Vehicle Range, by Martin MruzekIgor, Gajdáč Ľuboš, Kučera Dalibor Barta, from 9th International Scientific Conference Transbaltica 2015
[2] Energy-Optimal Speed Control for Electric Vehicles on Signalized Arterials, by Xinkai Wu, Xiaozheng He, Guizhen Yu, Member, IEEE, Arek Harmandayan, and Yunpeng Wang, from ICC 2016 – 2016 IEEE International Conference on Communications
[3] Energy-Optimal Platooning with Hybrid Vehicles, by Mattias Hovgard, Oscar Jonsson, Department of Electrical Engineering CHALMERS UNIVERSITY OF TECHNOLOGY
[4] EV range: everything you need to know, Car and driver, https://www.caranddriver.com/shopping-advice/a32603216/ev-range-explained/
[5] Implementation and evaluation of cooperative adaptive cruise control functionalities, by Jan-Niklas Meier, Aravind Kailas , Rawa Adla, George Bitar, Ehsan Moradi-Pari, Oubada Abuchaar, Mahdi Ali, Maher Abubakr, Richard Deering, Umair Ibrahim, Paritosh Kelkar, Vivek VijayaKumar, Jay Parikh, Samer Rajab, Masafumi Sakakida, Masashi Yamamoto from IET Intelligent Transport Systems 12, September 2018
[6] Towards reducing traffic congestion using cooperative adaptive cruise control on a freeway with a ramp, George Arnaout, Shannon Bowling, Journal of Industrial Engineering and Management, 2011
[7] Rethinking for electric mobility and range, https://www.audi.com/en/experience-audi/mobility-and-trends/e-mobility/e-tron-aerodynamic.html






